






I. Introduction▲
L'algorithme de Perlin est à l'origine de nombreuses textures paramétriques, comme le marbre, le bois, l'effet de nuages, de brume, et de nombreuses autres. Mais il est aussi utilisé pour la génération de reliefs et de terrains, la génération d'irrégularités dans la surface de solides (bump mapping) et de nombreuses autres applications.
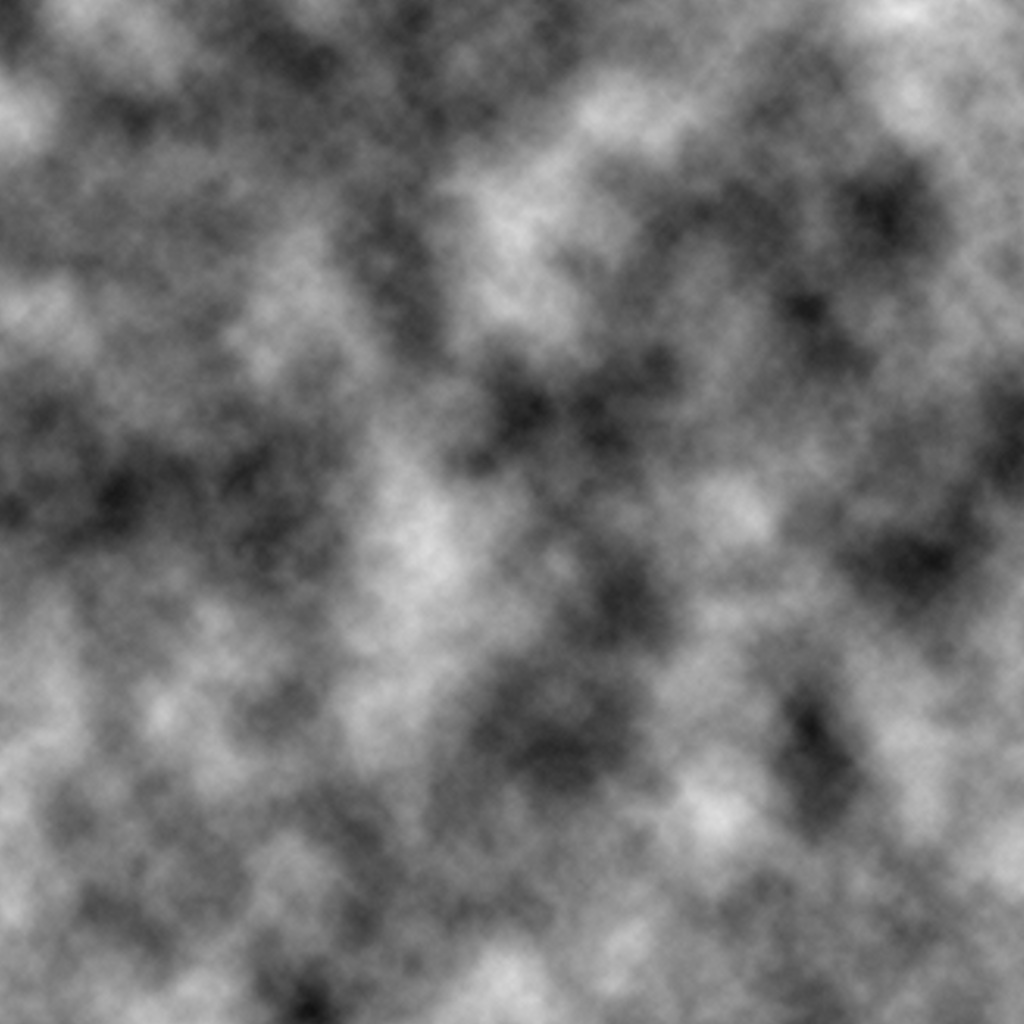
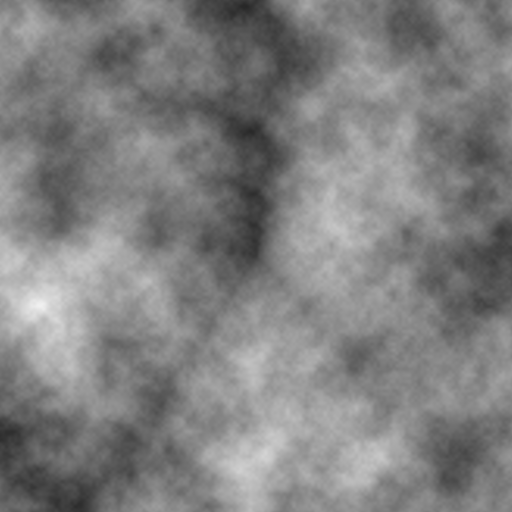
Nous nous contenterons de discuter de son application à la génération de textures paramétriques, comme le présente la figure suivante basée sur un bruit bidimensionnel.
Dans ces premières parties, nous étudierons une version simplifiée de cet algorithme. Il se décompose en trois grandes parties :
- une fonction de bruit qui permet d'associer des valeurs aléatoires à chaque point de l'espace kitxmlcodeinlinelatexdvp\mathbb{N}^{dim}finkitxmlcodeinlinelatexdvp ;
- une fonction de bruit lissé par interpolation ;
- une combinaison linéaire de fonctions de bruit lissé.
Pour obtenir notre bruit, nous allons d'abord devoir produire une image de type « neige » d'écran de télévision. Ensuite, nous allons la zoomer, et la lisser. Cela se fera en interpolant les valeurs entre chaque pixel. Enfin, une fois ce bruit lissé obtenu, nous le superposerons à différentes échelles pour produire le célèbre motif nuageux présenté en première page.

Une fois cette version simplifiée abordée, nous parlerons du vrai bruit, qui consiste à remplacer les pixels interpolés par un champ de gradients (la fonction de bruit nous servant alors à piocher aléatoirement parmi un jeu de gradients). La superposition de motifs reste inchangée.
II. Génération d'un bruit▲
II-A. Fonctions pseudoaléatoires▲
La première étape de l'algorithme consiste à former une fonction de bruit, c'est-à-dire une fonction kitxmlcodeinlinelatexdvpf: \mathbb{N} \rightarrow \mathbb{R}finkitxmlcodeinlinelatexdvp qui, à une valeur donnée, associe une valeur qui semble aléatoire. Il est important de remarquer que ce bruit pourra donc être reproduit, pour une même valeur. C'est très important, car si l'on souhaite par exemple l'utiliser pour générer une image, celle-ci ne doit pas systématiquement changer à chaque génération (à moins que ce changement ne soit voulu et contrôlé, ce dont nous reparlerons dans la partie suivante).
Vous avez un aperçu de bruit unidimensionnel et bidimensionnel avec la figure suivante.
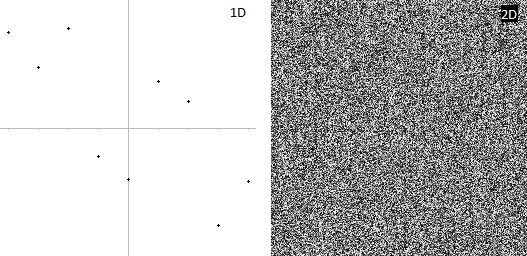
Il est difficilement possible de produire de réelles valeurs aléatoires, et difficile pour un observateur de discerner un motif, une fois une certaine complexité atteinte. On se contentera donc de fonctions déterministes, périodiques, mais au rendu « désordonné ».
Il nous faudra donc obtenir un jeu de valeurs aléatoires, dont le cycle (c'est-à-dire l'intervalle nécessaire pour obtenir à nouveau le même jeu de valeurs) est assez important pour qu'un observateur ne puisse s'en rendre compte.
Vous pouvez utiliser une fonction de génération aléatoire fournie par le langage que vous utilisez, comme la fonction rand du langage C, et générer un tableau de valeurs, ou encore utiliser votre propre fonction pseudoaléatoire.
Voici donc une fonction pseudoaléatoire particulière, tirée d'un article (Hugo Elias - Perlin Noise), et dont je serais bien incapable de vous décrire le fonctionnement. Sachez que vous pouvez la modifier en remplaçant les nombres premiers de cette formule par d'autres, relativement proches.
Je ne vous garantis pas que cela soit sans effet sur la répartition des probabilités, ni même la longueur des cycles. L'expérience montre simplement qu'effectivement, substituer d'autres nombres premiers du même ordre de grandeur offre un résultat tout aussi satisfaisant. Pour plus d'informations à ce sujet, je vous renvoie aux théories mathématiques correspondantes.
//Fournit une valeur aléatoire entre -1 et 1
double rand_noise(int t)
{
t = (t<<13) ^ t;
t = (t * (t * t * 15731 + 789221) + 1376312589);
return 1.0 - (t & 0x7fffffff) / 1073741824.0;
}
//On pourra obtenir une valeur entre 0 et 1 en utilisant
//la formule : (rand_noise(t) + 1.) / 2.II-B. Les fonctions de bruit▲
Suivant votre choix quant à l'obtention de votre jeu de valeurs aléatoires, l'implémentation de la fonction de bruit diffère.
Dans le cadre où vous travaillez sur une seule dimension (c'est le cas des courbes) votre fonction bruit se limitera à un simple accès à la valeur correspondant à votre coordonnée (que l'on notera x) ou encore à l'appel de la fonction rand\_noise.
Dans les autres cas, où vous travaillez sur un espace de dimension 2 ou supérieure, et que vous avez fait le choix d'utiliser un jeu de valeurs précalculées, il vous faudra générer un tableau bidimensionnel, ou bien encore un simple vecteur que vous utiliserez comme un tableau bidimensionnel.
double rand_set[W * H * K];
//Initialisation du tableau, etc.
double noise_3d(int x, int y, int z)
{
return rand_set[x + y*w + z*w*h];
}Dans le cas contraire, il vous faudra réaliser une fonction de bruit à plusieurs variables. Si vous tentez différentes expressions polynomiales, vous n'obtiendrez rien de bien concluant et des motifs ou déformations se profileront, entraînant la perte du caractère pseudoaléatoire que vous recherchez. Une bonne solution est la composition de la fonction de bruit. Il est nécessaire de multiplier le résultat de notre fonction de bruit par un scalaire (quelconque, mais de valeur suffisamment « grande » de façon à rendre une faible variation de la fonction de bruit significative) avant chaque composition, puisque nous avons kitxmlcodeinlinelatexdvp-1 <= rand\_noise <= 1finkitxmlcodeinlinelatexdvp. Observez l'exemple suivant :
double noise_2d(int x, int y)
{
int tmp = rand_noise(x) * 850000;
return rand_noise(tmp + y);
}D'où nous déduisons facilement la formule de calcul d'un bruit quadridimensionnel :
double noise_4d(int x, int y, int z, int t)
{
int tmp_x = rand_noise(x) * 850000;
int tmp_y = rand_noise(tmp_x + y) * 850000;
int tmp_z = rand_noise(tmp_y + z) * 850000;
return rand_noise(tmp_z + t);
}Et, pour conclure, une formule utilisable pour toute dimension :
double noise_nd(int *data_set, int dim)
{
int i;
double r = 0.;
for(i = 0; i < dim; i++)
r = rand_noise(data_set[i] + (int)(r * 850000) );
return r;
}III. Interpolations de valeurs▲
III-A. L'interpolation▲
L'interpolation est « une opération mathématique permettant de construire une courbe à partir des données d'un nombre fini de points ». En d'autres termes, c'est un processus qui consiste à définir une fonction continue prenant certaines valeurs en certains points, et ce selon certains critères que l'on choisit de s'imposer.
La deuxième phase de l'algorithme de Perlin consiste en l'interpolation de valeurs intermédiaires définies régulièrement en certains points de l'espace par une fonction de bruit. Concrètement, imaginons que l'on reprenne notre bruit unidimensionnel où l'on a associé à chaque entier une valeur pseudoaléatoire comprise entre -1 et 1, et que l'on souhaite tracer une courbe continue passant par ces points. On souhaite donc définir une fonction kitxmlcodeinlinelatexdvpg: \mathbb{R} \rightarrow \mathbb{R}finkitxmlcodeinlinelatexdvp dont la restriction à kitxmlcodeinlinelatexdvp\mathbb{N}finkitxmlcodeinlinelatexdvp est kitxmlcodeinlinelatexdvpffinkitxmlcodeinlinelatexdvp .
Il existe une infinité de fonctions qui respectent ces conditions. Toutefois, nous n'étudierons que trois cas particuliers. Nous ne détaillerons pas les aspects mathématiques et nous nous contenterons d'appréhender, « avec les mains », le fonctionnement de celles-ci.
III-B. L'interpolation linéaire▲
Il s'agit de la solution la plus simple que l'on puisse trouver à ce problème. Puisque nous avons un ensemble de points, pourquoi ne pas se contenter de les relier en traçant des segments qui joignent chaque point à ses deux voisins ? On constate alors immédiatement que la fonction est continue et bien définie.
On peut obtenir tous les points du segment kitxmlcodeinlinelatexdvpABfinkitxmlcodeinlinelatexdvp de façon paramétrique (c'est-à-dire selon une variable kitxmlcodeinlinelatexdvptfinkitxmlcodeinlinelatexdvp que l'on contrôle) en prenant kitxmlcodeinlinelatexdvpt\in[0, 1]finkitxmlcodeinlinelatexdvp auquel on associe le point kitxmlcodeinlinelatexdvpMfinkitxmlcodeinlinelatexdvp de coordonnées kitxmlcodeinlinelatexdvp(x_A * (1 - t) + t * x_B, y_A * (1 - t) + t * y_B)finkitxmlcodeinlinelatexdvp . Intuitivement, pour kitxmlcodeinlinelatexdvpt = 0finkitxmlcodeinlinelatexdvp on se trouve en kitxmlcodeinlinelatexdvpAfinkitxmlcodeinlinelatexdvp, et l'on glisse jusqu'en kitxmlcodeinlinelatexdvpBfinkitxmlcodeinlinelatexdvp de façon linéaire. Une autre façon de voir ceci est de constater que l'on se déplace proportionnellement à la progression de kitxmlcodeinlinelatexdvptfinkitxmlcodeinlinelatexdvp dans l'intervalle kitxmlcodeinlinelatexdvp[0, 1]finkitxmlcodeinlinelatexdvp.
Dans notre cas, nous souhaitons obtenir l'ordonnée en fonction de l'abscisse. Or, si l'on définit les points dont la valeur (issue de notre bruit) est imposée parmi les entiers, alors la partie décimale de chaque coordonnée correspond à notre paramètre.
On prendra donc la partie fractionnaire de kitxmlcodeinlinelatexdvpxfinkitxmlcodeinlinelatexdvp comme valeur de kitxmlcodeinlinelatexdvptfinkitxmlcodeinlinelatexdvp.
Ce qui nous amène finalement à la fonction d'interpolation suivante :
double linear_interpolate(double a, double b, double t)
{
return (1. - t) * a + t * b;
}III-C. L'interpolation cosinusoïdale▲
L'un des problèmes de l'interpolation linéaire est son aspect irrégulier, ce qui se traduit mathématiquement par l'absence d'une dérivée première. La condition que l'on va alors imposer est que la fonction obtenue soit continue et dérivable, à dérivée continue. On dira qu'elle est de classe kitxmlcodeinlinelatexdvpC^1finkitxmlcodeinlinelatexdvp, alors que l'interpolation linéaire est de classe kitxmlcodeinlinelatexdvpC^0finkitxmlcodeinlinelatexdvp.
Puisque le problème de l'interpolation linéaire se situe aux jonctions des segments, nous allons leur substituer une courbe dont la dérivée s'annule à chaque extrémité, nous assurant ainsi la dérivabilité.
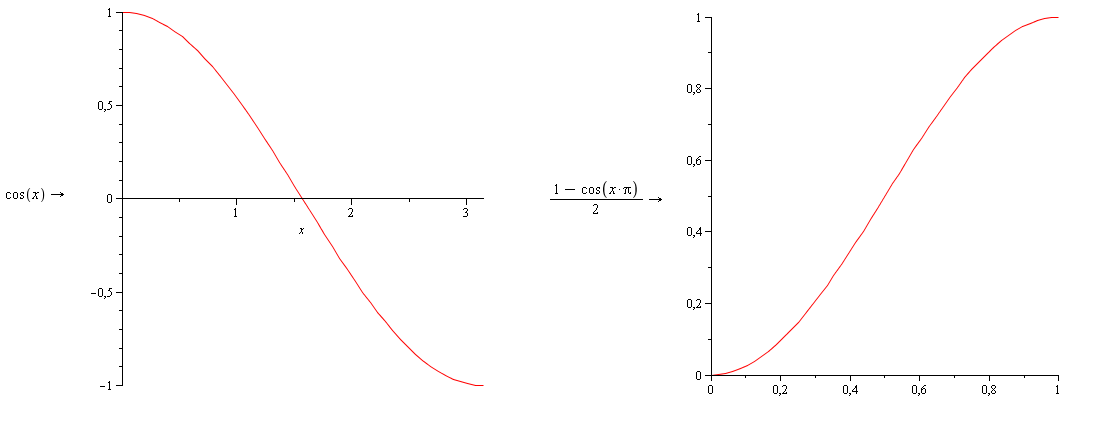
Une fonction qui se prête bien à ceci est bien sûr la fonction cosinus, dont la dérivée en kitxmlcodeinlinelatexdvp0finkitxmlcodeinlinelatexdvp et en kitxmlcodeinlinelatexdvp\frac{\pi}{2}finkitxmlcodeinlinelatexdvp s'annule. En appliquant une légère transformation, nous pouvons définir la fonction kitxmlcodeinlinelatexdvpc: [0,1] \rightarrow[0,1] x \mapsto \frac{1 - cos(x)}{2}finkitxmlcodeinlinelatexdvp.
Il existe des fonctions polynomiales qui ont une courbe et des propriétés de dérivabilité similaires, par exemple la fonction polynomiale d'Hermite. Nous en parlons dans la partie avancée de ce document.
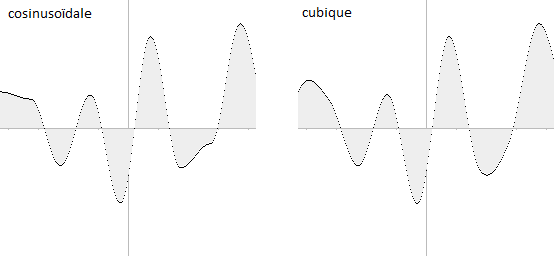
Voici les courbes de ces deux fonctions :
Se pose alors la question de « déformer » cette fonction pour que chacune de ses extrémités corresponde aux deux points que l'on souhaite joindre. En fait, plutôt que de chercher à déformer notre fonction, cherchons plutôt comment transformer notre interpolation linéaire. On observe que si l'on substitue kitxmlcodeinlinelatexdvptfinkitxmlcodeinlinelatexdvp par kitxmlcodeinlinelatexdvpc(t)finkitxmlcodeinlinelatexdvp on obtient bien une fonction dont la dérivée est nulle en 0 et 1, ce que nous recherchons.
Concrètement, cela se traduit par une contraction des distances au voisinage des extrémités, et à l'inverse par une élongation de celles-ci vers le centre de notre arc de courbe.
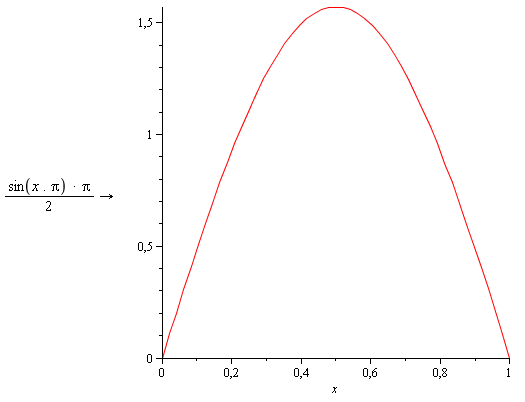
Une autre façon, plus cinématique, de se représenter la chose est de percevoir que le déplacement selon t est faible aux extrémités des segments et extrêmement rapide au voisinage de kitxmlcodeinlinelatexdvp\frac{1}{2}finkitxmlcodeinlinelatexdvp . Ce que confirme le graphe de la dérivée de kitxmlcodeinlinelatexdvpcfinkitxmlcodeinlinelatexdvp.
Ce qui nous donne, finalement :
double cosine_interpolate(double a, double b, double t)
{
double c = (1 - cos(t * 3.1415927)) * .5;
return (1. - c) * a + c * b;
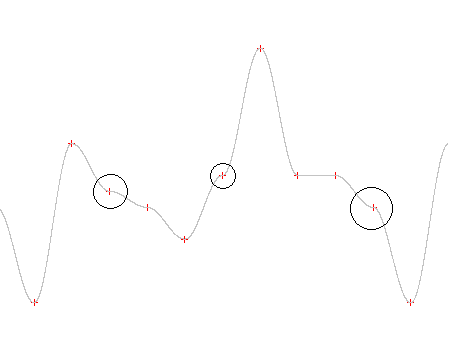
}Le rendu est particulièrement plus doux, comme le montre la figure ci-dessous. Persistent toutefois quelques aberrations (des exemples se trouvent aux centres des cercles) qui ne correspondent pas vraiment à l'idée que l'on se ferait de cette fonction, ce qui justifiera l'introduction d'une troisième méthode, plus lourde et plus complexe, mais au résultat visuellement plus agréable.
III-D. L'interpolation cubique▲
L'interpolation cubique apporte une solution aux problèmes que nous avons décelés alors que nous nous intéressions à l'interpolation cosinusoïdale. Nous allons utiliser des polynômes du troisième degré pour obtenir une approximation de la fonction en deux points.
En effectuant un recollement par morceaux, tout comme nous l'avons fait avec l'interpolation cosinusoïdale, nous obtiendrons une fonction de classe kitxmlcodeinlinelatexdvpC^2finkitxmlcodeinlinelatexdvp, c'est-à-dire deux fois dérivable à dérivée continue. Cela traduit un critère de régularité plus important.
Non seulement la courbe doit être lisse, mais les tangentes à cette courbe doivent varier de façon continue. C'est cependant une méthode coûteuse puisqu'elle ne nécessitera non pas deux mais quatre points.
Si nous voulons ajouter la continuité de la dérivée seconde en chacun des points, il devient nécessaire de faire intervenir les points situés avant et après la portion de courbe que nous souhaitons interpoler.
Nous nous retrouvons alors avec quatre équations. Vous pouvez obtenir plus de détails en consultant la bibliographie. Pour respecter ces quatre contraintes, il faut disposer de quatre variables que nous pouvons contrôler, ce qui nous amène à choisir un polynôme de degré trois.
Bien que l'idée soit de calculer la dérivée seconde en fonction des points précédents, il existe diverses façons de « régler » nos coefficients.
Nous allons utiliser un cas particulier (voir extrait de code ci-dessous). Il nous permettra d'obtenir une fonction polynomiale qui, définie sur l'intervalle kitxmlcodeinlinelatexdvp[-1, 1]finkitxmlcodeinlinelatexdvp a pour avantage de ne prendre que rarement ses valeurs hors de celui-ci.
[
//Interpolation des valeurs situées entre p0 et p1
//Nécessite deux points qui précèdent (resp. succèdent)
// à p1 (rep. p2).
double cubic_interpolate(double before_p0, double p0,
double p1, double after_p1)
{
//Calcul des coefficients de notre polynôme
double a3 = -0.5*before_p0 + 1.5*p0 - 1.5*p1 + 0.5*after_p1;
double a2 = before_p0 - 2.5*p0 + 2*p1 - 0.5*after_p1;
double a1 = -0.5*before_p0 + 0.5*p1;
double a0 = p0;
//Calcul de la valeur de ce polynôme en t
return (c3 * t*t*t) + (c2 * t*t) + (c1 * t) + c0;La différence est tout de suite perceptible, comme le montre la figure suivante.
III-E. Interpolation du bruit▲
Nous disposons maintenant de fonctions qui nous permettent d'interpoler entre deux valeurs de notre bruit. Nous pouvons donc écrire une fonction de « bruit lissé ». Elle prend donc en paramètre la coordonnée kitxmlcodeinlinelatexdvpxfinkitxmlcodeinlinelatexdvp, dont elle sépare la partie entière et la partie fractionnaire, pour ensuite interpoler entre le point de coordonnée kitxmlcodeinlinelatexdvp(x)finkitxmlcodeinlinelatexdvp et celui de coordonnée kitxmlcodeinlinelatexdvp(x+1)finkitxmlcodeinlinelatexdvp.
Dans un premier temps, le cas linéaire :
double smooth_noise(double x)
{
//Partie entière : E(x)
int integer_x = (int)x;
//Partie fractionnaire : x - E(x)
double fractional_x = x - integer_x;
//Bruit du point précédent :
double a = noise(integer_x);
//Bruit du point suivant :
double b = noise(integer_x + 1);
//Interpolation :
return linear_interpolate(a, b, fractional_x);
}Pour une interpolation cosinusoïdale, nous avons la même chose, à la fonction d'interpolation près. Le cas de l'interpolation cubique est légèrement plus complexe puisqu'il nécessite quatre points.
double smooth_noise(double x)
{
//Partie entière : E(x)
int integer_x = (int)x;
//Partie fractionnaire : x - E(x)
double fractional_x = x - integer_x;
//Bruit du point précédent :
double a = noise(integer_x);
//Bruit du point suivant :
double b = noise(integer_x + 1);
//Interpolation :
return linear_interpolate(a, b, fractional_x);
}III-F. Vers une autre dimension▲
Nous avons découvert trois méthodes, dans un ordre de coût, en temps de calcul, croissant. Malheureusement, toutes ces méthodes se sont limitées à une interpolation monodimensionnelle.
Qu'en est-il du cas, plus probable, où nous nous retrouvons avec deux, trois, ou même quatre dimensions (ce qui est plus courant que l'on pourrait le penser) ? Si l'on souhaite appliquer une texture de bruit de Perlin à un objet tridimensionnel, et ceci tout en animant la texture, on aurait alors besoin d'une quatrième dimension qui serait ici le temps.
Il existe une méthode qui permet de généraliser chacune de celles-ci à une dimension n, et c'est celle que nous allons décrire.
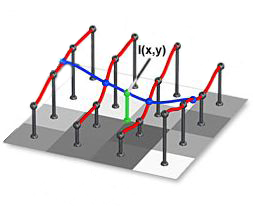
Supposons, dans un premier temps, que nous souhaitons interpoler un bruit bidimensionnel. Nous raisonnons donc dans le plan. Si l'on conserve notre habitude de placer nos points aux coordonnées entières, nous souhaitons donc interpoler la valeur d'un point M qui se trouve environné de quatre autres points, et sa valeur sera donc dépendante de chacun de ces points. Si l'on note kitxmlcodeinlinelatexdvp(X, Y)finkitxmlcodeinlinelatexdvp les coordonnées de M, et que kitxmlcodeinlinelatexdvpE(z)finkitxmlcodeinlinelatexdvp représente la partie entière de kitxmlcodeinlinelatexdvpzfinkitxmlcodeinlinelatexdvp, les 4 points ont pour coordonnées : kitxmlcodeinlinelatexdvpA=(E(X), E(Y))finkitxmlcodeinlinelatexdvp, kitxmlcodeinlinelatexdvpB=(E(X) + 1, E(Y))finkitxmlcodeinlinelatexdvp, kitxmlcodeinlinelatexdvpC=(E(X), E(Y) + 1)finkitxmlcodeinlinelatexdvp, kitxmlcodeinlinelatexdvpD=(E(X) + 1, E(Y) + 1)finkitxmlcodeinlinelatexdvp
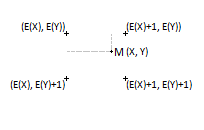
Cherchons à subdiviser le problème pour le rendre plus simple. Nos quatre points forment deux à deux, le long de l'axe kitxmlcodeinlinelatexdvpOxfinkitxmlcodeinlinelatexdvp, des segments. Nous pouvons donc chercher à interpoler le long du segment kitxmlcodeinlinelatexdvp[AB]finkitxmlcodeinlinelatexdvp en prenant la partie fractionnaire de kitxmlcodeinlinelatexdvpXfinkitxmlcodeinlinelatexdvp comme troisième paramètre de notre fonction d'interpolation. Nous pouvons faire de même pour le segment kitxmlcodeinlinelatexdvp[CD]finkitxmlcodeinlinelatexdvp. Nous nous retrouvons alors avec les deux valeurs des points kitxmlcodeinlinelatexdvpFfinkitxmlcodeinlinelatexdvp et kitxmlcodeinlinelatexdvpGfinkitxmlcodeinlinelatexdvp de la figure :
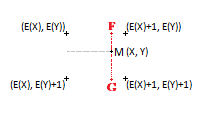
Nous pouvons, une troisième fois, interpoler le long du segment kitxmlcodeinlinelatexdvp[FG]finkitxmlcodeinlinelatexdvp afin d'obtenir la valeur en kitxmlcodeinlinelatexdvpMfinkitxmlcodeinlinelatexdvp . Pour cela, nous prendrons les deux valeurs calculées précédemment ainsi que la partie fractionnaire de la coordonnée kitxmlcodeinlinelatexdvpYfinkitxmlcodeinlinelatexdvp de kitxmlcodeinlinelatexdvpMfinkitxmlcodeinlinelatexdvp.
Si l'on résume le code correspondant, nous obtenons :
//...
double f = linear_interpolate(a, b, fractional_x);
double g = linear_interpolate(c, d, fractional_x);
double result = linear_interpolate(f, g, fractional_y);Nous pouvons généraliser ceci à trois ou quatre dimensions. Pour n dimensions, il suffit d'interpoler les n?1 dimensions deux fois, avant d'interpoler les deux valeurs résultantes. Un exemple en dimension 3 :
double smooth_noise(double x, double y, double z)
{
//Partie entière : E(x)
int integer_x = (int)x;
int integer_y = (int)y;
int integer_z = (int)z;
//Partie fractionnaire : x - E(x)
double fractional_x = x - integer_x;
double fractional_y = y - integer_y;
double fractional_z = z - integer_z;
//Bruit des quatre points d'un cube
double a0 = noise(integer_x, integer_y, integer_z);
double a1 = noise(integer_x + 1, integer_y, integer_z);
double b0 = noise(integer_x, integer_y + 1, integer_z);
double b1 = noise(integer_x + 1, integer_y + 1, integer_z);
double c0 = noise(integer_x, integer_y, integer_z + 1);
double c1 = noise(integer_x + 1, integer_y, integer_z + 1);
double d0 = noise(integer_x, integer_y + 1, integer_z + 1);
double d1 = noise(integer_x + 1, integer_y + 1, integer_z + 1);
//Interpolation sur la face inférieure du cube :
double a = linear_interpolate(a0, a1, fractional_x);
double b = linear_interpolate(b0, b1, fractional_x);
double v = linear_interpolate(a, b, fractional_y);
//Interpolation sur la face supérieure du cube :
double c = linear_interpolate(c0, c1, fractional_x);
double d = linear_interpolate(d0, d1, fractional_x);
double w = linear_interpolate(c, d, fractional_y);
//Interpolation entre les points
// situés sur chacune des deux faces :
return linear_interpolate(v, w, fractional_z);
}Il est évident que pour des dimensions plus élevées, nous n'allons pas expliciter le calcul pour chacun de nos points. Nous préférerons une méthode récursive. L'extrait de code suivant est un exemple valable pour toute dimension. Il reste toutefois délicat pour une première lecture.
double smooth_noise(double data[], int dim)
{
return _smooth_noise(data, dim, dim);
}
double _smooth_noise(double data[], int dim, int dim_work)
{
//Condition d'arrêt de la boucle récursive
//Nous permet d'obtenir les points
if(dim_work <= 0)
//Fonction de bruit multidimensionnel
return noise(data, dim);
//Récupère la dernière dimension sur
// laquelle nous travaillons
double x = data[dim_work - 1];
int integer_x = (int)x;
double fractional_x = x - integer_x;
//Interpolation de la dimension dim_work - 1,
// avec x = integer_x
data[dim_work - 1] = integer_x;
double a = _smooth_noise(data, dim, dim_work - 1);
//Interpolation de la dimension dim_work - 1,
// avec x = integer_x + 1
data[dim_work - 1] = integer_x + 1;
double b = _smooth_noise(data, dim, dim_work - 1);
//Restauration du tableau, pour ne pas
//perdre la valeur en sortant de la fonction
data[dim_work - 1] = x;
//Interpolation de la dimension dim_work
return cosine_interpolate(a, b, fractional_x);
}III-G. Splines cubiques▲
Nous avons pu généraliser les interpolations linéaires et cosinusoïdales à plusieurs dimensions. Ceci peut aussi s'appliquer à notre interpolation cubique. Vous pourrez en entendre parler sous le nom de « spline cubique ». Cette fois, nous ne nous contenterons pas de deux points, mais de quatre points. Le plus simple reste encore un schéma, pour la dimension 2.
Le mécanisme est identique aux exemples précédents, à ceci près que nous nécessiterons quatre points par interpolation. Nous nous contenterons d'un exemple en dimension 2.
//Nous interpolons sur une ligne, pour un y fixé
double smooth_noise_firstdim(int integer_x,
int integer_y, double fractional_x)
{
double v0 = noise(integer_x - 1, integer_y);
double v1 = noise(integer_x, integer_y);
double v2 = noise(integer_x + 1, integer_y);
double v3 = noise(integer_x + 2, integer_y);
return cubic_interpolate(v0, v1, v2, v3, fractional_x);
}
//Nous interpolons sur les y, en utilisant la fonction précédente
double smooth_noise(double x, double y)
{
int integer_x = (int)x;
double fractional_x = x - integer_x;
int integer_y = (int)y;
double fractional_y = y - integer_y;
double t0 = smooth_noise_firstdim(integer_x,
integer_y - 1, fractional_x);
double t1 = smooth_noise_firstdim(integer_x,
integer_y, fractional_x);
double t2 = smooth_noise_firstdim(integer_x,
integer_y + 1, fractional_x);
double t3 = smooth_noise_firstdim(integer_x,
integer_y + 2, fractional_x);
return cubic_interpolate(t0, t1, t2, t3, fractional_y));
}IV. Le bruit de Perlin▲
IV-A. Compréhension et implémentation▲
Nous disposons maintenant de tous les outils nécessaires à la réalisation de notre « bruit de Perlin ».
Le bruit de Perlin est formé d'une somme de fonctions de bruit, dont la fréquence et l'amplitude varient. Ici, nous appellerons fréquence l'inverse du pas, et nous appellerons pas l'intervalle entre deux points définis par notre bruit. Jusqu'à présent, deux de nos points étaient séparés par une distance de kitxmlcodeinlinelatexdvp1finkitxmlcodeinlinelatexdvp, mais nous aurions très bien pu choisir kitxmlcodeinlinelatexdvp10finkitxmlcodeinlinelatexdvp, ou bien kitxmlcodeinlinelatexdvp0.5finkitxmlcodeinlinelatexdvp.
Nous allons donc chercher à faire varier le pas. Pour ce faire, nul besoin de modifier notre fonction smooth\_noise ; si nous multiplions nos coordonnées par kitxmlcodeinlinelatexdvp2finkitxmlcodeinlinelatexdvp, avant d'appeler cette fonction, nous divisons l'intervalle entre deux points par deux. Si, à l'inverse, nous les multiplions par « 0.5 », alors nous multiplions l'intervalle entre deux points par deux.
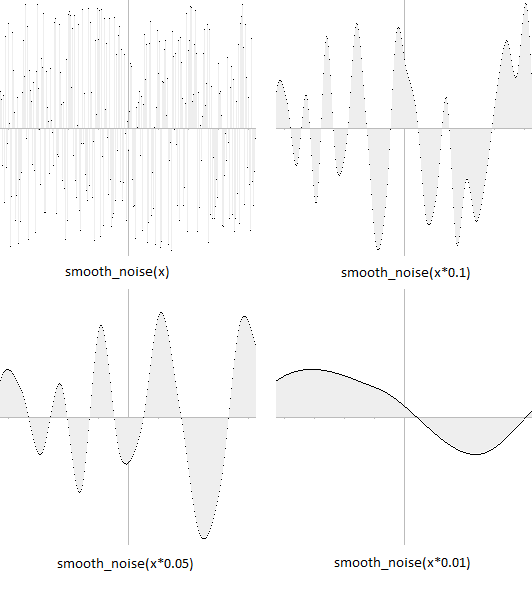
Si nous cherchons donc à multiplier notre pas par kitxmlcodeinlinelatexdvpkfinkitxmlcodeinlinelatexdvp, nous multiplions nos coordonnées par la fréquence kitxmlcodeinlinelatexdvp\frac{1}{k}finkitxmlcodeinlinelatexdvp.
La figure suivante représente différents appels à notre fonction, où le paramètre kitxmlcodeinlinelatexdvpxfinkitxmlcodeinlinelatexdvp de notre fonction de « bruit lissé » est la coordonnée x du pixel de l'image.
Nous allons donc sommer des courbes d'amplitude de plus en plus faible. Le contrôle de la variation d'amplitude de chacune de ces courbes (et donc, leur part dans la courbe finale) lors de cette somme se fera par un paramètre que l'on nommera la persistance. Ceci, adjoint à des courbes de variation de plus en plus rapide, va créer l'effet « nuageux » du bruit de Perlin. Pour être exacts, nous approximons une fractale où si l'on observe de plus près une zone particulière, nous retrouvons le même motif qu'à l'échelle précédente.
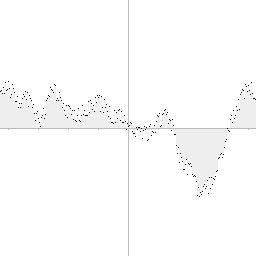
Si nous reprenons nos courbes de l'exemple précédent et que nous les sommons, en pondérant l'amplitude de chacune de ces fonctions, nous obtenons la figure :
Nous allons donc réaliser une fonction qui prendra en argument :
- le nombre d'octaves kitxmlcodeinlinelatexdvpnfinkitxmlcodeinlinelatexdvp : le nombre d'appels à la fonction de « bruit lissé » ;
- la fréquence kitxmlcodeinlinelatexdvpffinkitxmlcodeinlinelatexdvp : la fréquence de la première fonction de « bruit lissé » ;
- la persistance kitxmlcodeinlinelatexdvppfinkitxmlcodeinlinelatexdvp : correspond au facteur venant modifier l'amplitude de chaque fonction de « bruit lissé ».
Concrètement, nous allons faire la somme de n appels à smooth\_noise en multipliant à chaque fois la fréquence par deux, et l'amplitude (qui vaut initialement kitxmlcodeinlinelatexdvp1finkitxmlcodeinlinelatexdvp ) par la persistance. On obtiendra donc la fonction : kitxmlcodeinlinelatexdvpf : x \mapsto \Sigma^{n - 1}_{i = 0}p^i*smooth\_noise(f*2^i*x)finkitxmlcodeinlinelatexdvp.
Attention, pour conserver nos valeurs dans l'intervalle kitxmlcodeinlinelatexdvp[-1, 1]finkitxmlcodeinlinelatexdvp, nous devons diviser le résultat total par la somme des amplitudes. Pour simplifier nos calculs et éviter de sommer chacune d'elles, on peut utiliser la formule de la somme des termes d'une série géométrique kitxmlcodeinlinelatexdvp\sum_{i=0}^{n-1}{p^i}=\frac{1-p^{n}}{1-p}finkitxmlcodeinlinelatexdvp (à condition que kitxmlcodeinlinelatexdvpp \neq 1finkitxmlcodeinlinelatexdvp). On divisera donc par cette valeur.
Nous parvenons donc, en termes de code C, à l'extrait :
double perlin(int octaves, double frequency,
double persistence, double x)
{
double r = 0.;
double f = frequency;
double amplitude = 1.;
for(int i = 0; i < octaves; i++)
{
r += smooth_noise(x * f) * amplitude;
amplitude *= persistence;
f *= 2;
}
double geo_lim = (1 - persistence) / (1 - amplitude);
return r * geo_lim;
}IV-B. Pixelisation aux coordonnées négatives▲
Si vous vous contentez de la version proposée, et que vous souhaitez utiliser l'une des fonctions de « bruit lissé » avec des coordonnées négatives, vous vous apercevrez alors que nos valeurs sont incorrectes. Vous obtiendrez probablement quelque chose de comparable à la figure :
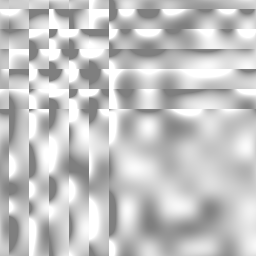
Le problème vient de notre façon de récupérer la partie décimale pour des valeurs négatives. En effet, convertir kitxmlcodeinlinelatexdvp-0.5finkitxmlcodeinlinelatexdvp en entier nous donne kitxmlcodeinlinelatexdvp0finkitxmlcodeinlinelatexdvp là où nous attendrions kitxmlcodeinlinelatexdvp-1finkitxmlcodeinlinelatexdvp.
Il faut donc corriger avec un bloc conditionnel similaire à l'extrait :
if(x >= 0)
integer_x = (int)x;
else
integer_x = (int)x - 1;
fractional_x = x - integer_x;IV-C. Motif fractal évident au centre d'homothétie▲
Ce premier problème corrigé, intéressons-nous au bruit de Perlin, toujours au centre de notre repère. Un regard attentif saura discerner la redondance du même motif, dont seule la taille varie. Vous pourrez même, avec un peu de chance, compter combien d'exemplaires du même nuage vous retrouvez, tous alignés sur une droite passant par l'origine (cf. figure suivante). Vous remarquerez alors que cela correspond exactement à l'octave de votre fonction de « bruit de Perlin ».
Ce problème est dû au simple fait que chacune de vos fonctions de bruit a pour centre d'homothétie l'origine. Ceci peut facilement se régler en ajoutant une translation du centre de cette homothétie qui est fonction de l'indice de la fonction de bruit.
Plutôt que de longs discours, un exemple concret sera bien plus parlant.
double perlin(int octaves, double frequency,
double persistence, double x)
{
double r = 0.;
double f = frequency;
double amplitude = 1.;
for(int i = 0; i < octaves; i++)
{
//Translation du centre de symétrie en i * 4096
int t = i * 4096;
//Calcul du bruit translaté
r += smooth_noise(x * f + t) * amplitude;
amplitude *= persistence;
f *= 2;
}
double geo_lim = (1 - persistence) / (1 - amplitude);
return r * geo_lim;
}V. L'algorithme original▲
V-A. Champs vectoriels▲
L'algorithme que je vous ai présenté jusqu'ici est le plus simple, mais de loin le moins efficace, et diffère du bruit de Perlin original, tel que K. Perlin l'implémenta. Jusqu'ici nous avons considéré un champ scalaire, c'est-à-dire qu'à chaque point de notre espace, nous avons associé une valeur scalaire comprise dans l'intervalle kitxmlcodeinlinelatexdvp[-1, 1]finkitxmlcodeinlinelatexdvp . L'approche de l'algorithme original est légèrement différente. En effet, plutôt que d'associer à chaque point entier de notre espace une valeur, nous allons lui associer un vecteur, qui définira un gradient de couleurs. Ce gradient représente une variation de la valeur -1 à la valeur 1.
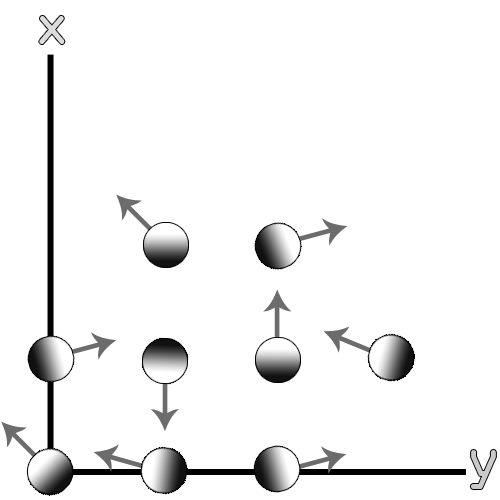
Par la suite, nous effectuerons le produit scalaire de chacun de ces vecteurs de gradient, avec le vecteur allant du point auquel est associé ce gradient vers le point de l'espace que nous considérons. Nous obtiendrons ainsi des valeurs scalaires (4 pour un plan) que nous combinerons en utilisant une interpolation similaire à l'interpolation cosinusoïdale.
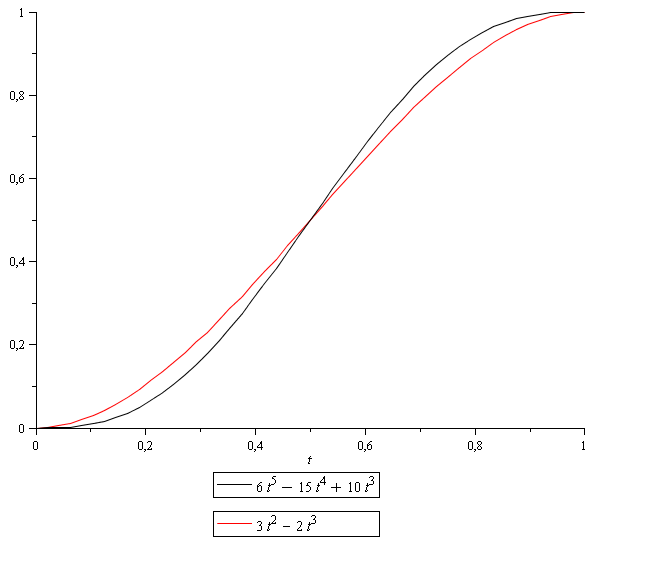
À l'origine, K. Perlin utilisa la fonction polynomiale d'Hermite, à savoir kitxmlcodeinlinelatexdvpf(t) = 3t^2 - 2t^3finkitxmlcodeinlinelatexdvp qui présente une courbe tout à fait adaptée à ce que nous cherchons (cf. interpolation cosinusoïdale) et qui vérifie bien la condition d'annulation de ses dérivées premières en 0 et 1. Toutefois, il est plus que souhaitable que les dérivées secondes s'annulent aussi en ces points, assurant ainsi une « meilleure » continuité.
Les effets sont visibles lorsque l'on utilise le bruit de Perlin pour du bump mapping, ou encore de la génération de terrain. En effet, ce sont ici les dérivées premières et secondes qui entrent en jeu. La non-utilisation de ce polynôme provoque des discontinuités, parfois très visibles. Je vous renvoie au document Advanced Perlin Noise.
Ceci peut être obtenu grâce à la fonction polynomiale kitxmlcodeinlinelatexdvpf(t) = 6t^5 - 15t^4 + 10t^3finkitxmlcodeinlinelatexdvp.
V-B. Tables de hachage▲
Afin d'accroître de façon considérable la vitesse de calcul du bruit (sans perte de qualité notable), nous utiliserons des tables de hachage pour les deux opérations essentielles de notre calcul.
Dans un premier temps, nous n'utiliserons plus notre fonction de bruit aléatoire, mais une permutation kitxmlcodeinlinelatexdvp\sigma(n)finkitxmlcodeinlinelatexdvp sur l'ensemble des 256 premiers entiers. Cela signifie qu'à chaque nombre compris entre kitxmlcodeinlinelatexdvp0finkitxmlcodeinlinelatexdvp et kitxmlcodeinlinelatexdvp255finkitxmlcodeinlinelatexdvp, nous lui associons une nouvelle valeur entière kitxmlcodeinlinelatexdvp\sigma(n)finkitxmlcodeinlinelatexdvp comprise de 0 à 255. Cette table de permutation remplacera notre fonction pseudoaléatoire. Il va de soi qu'elle doit être, elle-même, pseudoaléatoire. Nous prendrons la table proposée dans un des documents de référence, qui convient parfaitement.
Puisque nos valeurs sont théoriquement infinies, nous devrons ramener la partie entière de chacune des coordonnées à l'intervalle kitxmlcodeinlinelatexdvp[0, 255]finkitxmlcodeinlinelatexdvp. Comme ces valeurs sont judicieusement choisies, pour calculer le modulo, il nous suffira de conserver les 8 premiers bits de chacune des coordonnées, ce qui est une opération élémentaire des plus rapides.
Pour rappel, un calcul de modulo possède un coût identique (i386) à celui d'une division. Aussi, puisqu'une division par une puissance de 2 est un simple décalage binaire, le calcul d'un modulo par une puissance de 2 est une simple conservation de bits.
Nous composerons nos permutations sur le même modèle que la génération de bruit multidimensionnel. Nous aurons donc kitxmlcodeinlinelatexdvp\sigma((\sigma((\sigma(X \% 256) + Y) \% 256) + Z) \% 256)finkitxmlcodeinlinelatexdvp.
Afin, toujours, de réduire le nombre d'opérations, nous utiliserons une table qui fait correspondre les 512 premiers entiers aux 256 premiers. Nous la construirons à partir de la première, et poserons perm[i] = sigma[i & 0xFF] pour tout i de 0 à 511.
Dans un second temps, nous formerons une table de hachage qui fera correspondre à notre valeur aléatoire un vecteur. Nous choisirons ces vecteurs de façon à ce que leur norme soit du même ordre de grandeur, et qu'ils soient approximativement également répartis dans l'espace. Concrètement, pour un bruit 2D, nous prendrons des points répartis en cercle, et pour un bruit 3D le milieu des arêtes d'un cube.
Il n'est pas nécessaire de posséder 255 vecteurs, et l'outil mathématique qu'est le modulo nous sera très utile. Seuls 12 vecteurs suffisent pour un bruit 3D. Mais afin de faciliter le calcul du modulo, nous pourrons prendre 16 vecteurs, en ajoutant simplement le tétraèdre régulier formé des points kitxmlcodeinlinelatexdvp(1,1,0), (-1,1,0), (0,-1,1), (0,-1,-1)finkitxmlcodeinlinelatexdvp.
V-C. Une implémentation du cas tridimensionnel▲
Pour décrire cet algorithme de façon efficace, je vous propose un code commenté, reprenant ce dont nous avons parlé précédemment, correspondant a l'implémentation d'un bruit de Perlin tridimensionnel. Vous pourrez facilement l'adapter en une version bidimensionnelle, ou bien ajouter quelques vecteurs pour former un hypercube et obtenir un bruit 4D.
K. Perlin conseille, dès que l'on a affaire à plus de trois dimensions, d'utiliser le « simplex noise », dont il est question dans le chapitre suivant. Si l'on compare la complexité logarithmique du bruit de Perlin et du simplex noise relativement à la dimension, le premier est en kitxmlcodeinlinelatexdvpO(2^n)finkitxmlcodeinlinelatexdvp contre kitxmlcodeinlinelatexdvpO(n^2)finkitxmlcodeinlinelatexdvp pour le second.
//////
//La table de permutation :
//////
//Elle associe à chaque valeur comprise entre 0 et 256 une unique
// valeur elle aussi comprise entre 0 et 256. C'est une permutation.
//Afin d'éviter des opérations de modulo, dans le souci d'accroître
// la vitesse de calcul, elle est définie de 0 à 512.
unsigned char perm[512] = {
//0 à 256
151,160,137,91,90,15,131,13,201,95,96,53,194,233,7,225,140,
36,103,30,69,142,8,99,37,240,21,10,23,190,6,148,247,120,234,
75,0,26,197,62,94,252,219,203,117,35,11,32,57,177,33,88,237,
149,56,87,174,20,125,136,171,168,68,175,74,165,71,134,139,
48,27,166,77,146,158,231,83,111,229,122,60,211,133,230,220,
105,92,41,55,46,245,40,244,102,143,54,65,25,63,161,1,216,80,
73,209,76,132,187,208,89,18,169,200,196,135,130,116,188,159,
86,164,100,109,198,173,186,3,64,52,217,226,250,124,123,5,
202,38,147,118,126,255,82,85,212,207,206,59,227,47,16,58,17,
182,189,28,42,223,183,170,213,119,248,152,2,44,154,163,70,
221,153,101,155,167,43,172,9,129,22,39,253,19,98,108,110,79,
113,224,232,178,185,112,104,218,246,97,228,251,34,242,193,
238,210,144,12,191,179,162,241,81,51,145,235,249,14,239,107,
49,192,214,31,181,199,106,157,184,84,204,176,115,121,50,45,
127,4,150,254,138,236,205,93,222,114,67,29,24,72,243,141,
128,195,78,66,215,61,156,180,
//257 à 512
151,160,137,91,90,15,131,13,201,95,96,53,194,233,7,225,140,
//...
127,4,150,254,138,236,205,93,222,114,67,29,24,72,243,141,
128,195,78,66,215,61,156,180};
//////
//La table des vecteurs :
//////
//Elle contient les gradients de couleurs
// que nous allons associer à chaque point de l'espace.
static int _grad3[16][3] = {
//Le cube
{1,1,0},{-1,1,0},{1,-1,0},{-1,-1,0},
{1,0,1},{-1,0,1},{1,0,-1},{-1,0,-1},
{0,1,1},{0,-1,1},{0,1,-1},{0,-1,-1},
//Ainsi qu'un tétraèdre supplémentaire
{1,1,0},{-1,1,0},{0,-1,1},{0,-1,-1}};
////
//Fonction : Produit scalaire
////
//Effectue le produit scalaire du vecteur V(v[0], v[1], v[2])
// avec U(x, y, z).
//Cette fonction nous servira à calculer le produit scalaire
// entre nos gradients de couleurs et nos vecteurs dirigés
// vers notre point.
double fast_dot(const int *v, const double x,
const double y, const double z)
{
return v[0] * x + v[1] * y + v[2] * z;
}
////
//Fonction : Obtention du gradient pour un point P(x, y, z)
// de l'espace
////
int *get_grad(int x, int y, int z)
{
//Calcule un bruit aléatoire de 3 variables, via la table
// de permutation.
int rand_value = perm[z + perm[y + perm[x]]];
//Applique un modulo 16 à cette valeur pour obtenir un
// gradient de couleurs, puis renvoie un pointeur sur
// cet élément.
return _grad3[rand_value & 15];
}
////
//Fonction : Fonction polynomiale à dérivées première
// et seconde nulles
////
//Calcule simplement la valeur de ce polynôme en x=t
double quintic_poly(const double t)
{
const double t3 = t * t * t;
return t3 * (t * (t * 6. - 15.) + 10.);
}
////
//Fonction : Sépare la partie entière et fractionnaire
////
void int_and_frac(double value, int *integer_part,
double *fractional_part)
{
integer_part = (int)value;
if(value < 0)
integer_part -= 1;
fractional_part = value - integer_part;
}
//La fonction principale, permettant d'obtenir le bruit lissé
double smooth_noise_3d(double x_pos, double y_pos, double z_pos)
{
//Les parties entières
int X, Y, Z;
//Les parties fractionnaires
// x, y, z;
//Comme pour le précédent algorithme, nous séparons parties
// entière et fractionnaire.
int_and_frac(x_pos, &X, &x);
int_and_frac(y_pos, &Y, &y);
int_and_frac(z_pos, &Z, &z);
//Nous appliquons un modulo 256, de façon à ce que ces
// valeurs soient comprises dans notre table de permutation,
// et que nous puissions utiliser la fonction d'obtention
// de gradient.
X &= 255;
Y &= 255;
Z &= 255;
//Nous récupérons les gradients en chacun des sommets du cube
// contenant notre point.
//Nous faisons alors le produit de chacun de ces gradients
// obtenu en un sommet S par le vecteur issu de S et dirigé
// vers notre point M(x_pos, y_pos, z_pos).
//On retrouve facilement ces valeurs
// en dessinant un schéma de notre cube.
//Chacune de ces variables (résultat de ce produit scalaire)
// porte un nom constitué de la lettre 'g' suivie des
// coordonnées x, y, et z du point du cube dont il est issu.
const double g000 = fast_dot(get_grad(X, Y, Z),
x, y, z);
const double g001 = fast_dot(get_grad(X, Y, Z + 1),
x, y, z - 1.);
const double g010 = fast_dot(get_grad(X, Y + 1, Z),
x, y - 1., z);
const double g011 = fast_dot(get_grad(X, Y + 1, Z + 1),
x, y - 1., z - 1.);
const double g100 = fast_dot(get_grad(X + 1, Y, Z),
x - 1., y, z);
const double g101 = fast_dot(get_grad(X + 1, Y, Z + 1),
x - 1., y, z - 1.);
const double g110 = fast_dot(get_grad(X + 1, Y + 1, Z),
x - 1., y - 1., z);
const double g111 = fast_dot(get_grad(X + 1, Y + 1, Z + 1),
x - 1., y - 1., z - 1.);
//Comme pour l'interpolation cosinusoïdale, nous calculons
// le polynôme pour chacune de nos valeurs d'interpolation :
// u pour l'interpolation le long de l'axe des x
// v pour l'interpolation le long de l'axe des y
// w pour l'interpolation le long de l'axe des z
const double u = quintic_poly(x);
const double v = quintic_poly(y);
const double w = quintic_poly(z);
//Comme nous l'avons fait avec l'interpolation cubique,
// nous composerons :
// l'interpolation le long de l'axe x par
// l'interpolation le long de l'axe y.
//Nous interpolons le long de l'axe des x sur chacune
// des arêtes parallèles à cet axe de notre cube.
const double x00 = Math::linear_interpolate(g000 , g100, u);
const double x10 = Math::linear_interpolate(g010 , g110, u);
const double x01 = Math::linear_interpolate(g001 , g101, u);
const double x11 = Math::linear_interpolate(g011 , g111, u);
//Nous interpolons les arêtes deux à deux parallèles
// se trouvant sur la même face de notre cube.
const double xy0 = Math::linear_interpolate(x00 , x10, v);
const double xy1 = Math::linear_interpolate(x01 , x11, v);
//Enfin, nous interpolons entre les faces inférieures et
// la face supérieure de notre cube.
const double xyz = Math::linear_interpolate(xy0 , xy1, w);
return xyz;
}
//La somme des diverses octaves pour obtenir le motif nuageux
// est identique au précédent algorithme.VI. Simplex Noise▲
Si l'on souhaite disposer d'un bruit de Perlin quadridimensionnel, ou de dimension supérieure, on se retrouve face à un temps de calcul important que l'on souhaiterait réduire. Pour parer cette difficulté, Ken Perlin proposa le Simplex noise. Le terme Simplex fait référence aux simplexes réguliers, les solides réguliers que l'on peut construire avec un nombre minimal de points à dimension kitxmlcodeinlinelatexdvpnfinkitxmlcodeinlinelatexdvp fixé. En dimension 2, nous trouvons le triangle équilatéral, et en dimension 3, le tétraèdre.
VI-A. Principe▲
L'idée essentielle est de paver l'espace de dimension kitxmlcodeinlinelatexdvpnfinkitxmlcodeinlinelatexdvp avec des simplexes réguliers de côté kitxmlcodeinlinelatexdvp1finkitxmlcodeinlinelatexdvp. À chaque sommet kitxmlcodeinlinelatexdvpsfinkitxmlcodeinlinelatexdvp issu de ce pavage, on associe un vecteur gradient kitxmlcodeinlinelatexdvp\vec{G_s}finkitxmlcodeinlinelatexdvp, tout comme nous l'avions fait dans le cas du bruit de Perlin. On donne alors les coordonnées d'un point kitxmlcodeinlinelatexdvpP(x_1, \dots, x_n)finkitxmlcodeinlinelatexdvp et l'on cherche les trois sommets les plus proches, c'est-à-dire à quel n-simplexe ce point appartient. Si l'on note kitxmlcodeinlinelatexdvpA_1, \dots, A_{n+1}finkitxmlcodeinlinelatexdvp les kitxmlcodeinlinelatexdvpn+1finkitxmlcodeinlinelatexdvp sommets de ce simplexe, on détermine alors les vecteurs kitxmlcodeinlinelatexdvp\vec{A_1P}, \vec{A_2P}, \dots, \vec{A_{n+1}P}finkitxmlcodeinlinelatexdvp. Enfin, on choisit une fonction radiale kitxmlcodeinlinelatexdvpf(r)finkitxmlcodeinlinelatexdvp qui s'annule et change de signe si la distance kitxmlcodeinlinelatexdvpr = |\vec{A_iP}|finkitxmlcodeinlinelatexdvp de kitxmlcodeinlinelatexdvpPfinkitxmlcodeinlinelatexdvp à l'un des sommets kitxmlcodeinlinelatexdvpA_ifinkitxmlcodeinlinelatexdvp est supérieure à kitxmlcodeinlinelatexdvp\frac{1}{2}finkitxmlcodeinlinelatexdvp.
De cette façon on s'assure qu'en un point $P$, deux fonctions radiales ne peuvent s'additionner.
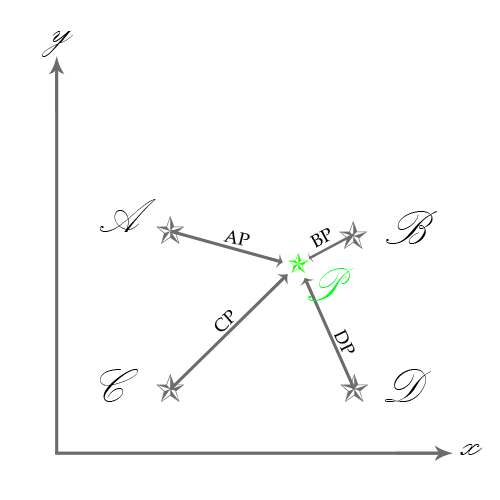
La valeur du bruit en kitxmlcodeinlinelatexdvpPfinkitxmlcodeinlinelatexdvp est alors la somme, sur chacun des sommets ; kitxmlcodeinlinelatexdvp\sum_{i=0}^{n+1} f(r_i) \vec{A_iP}.\vec{G_{A_i}}finkitxmlcodeinlinelatexdvp où kitxmlcodeinlinelatexdvpr_i = |\vec{A_iP}|finkitxmlcodeinlinelatexdvp c'est-à-dire la somme des produits scalaires des vecteurs gradient par les vecteurs « sommet kitxmlcodeinlinelatexdvp\tofinkitxmlcodeinlinelatexdvp point », pondérée par les fonctions radiales. La figure suivante présente l'application de cette formule à un unique sommet, ce qui correspond à kitxmlcodeinlinelatexdvpf(|\vec{AP}|) \vec{AP}.\vec{G_{A}}finkitxmlcodeinlinelatexdvp. Le vecteur gradient est kitxmlcodeinlinelatexdvp\vec{G_{A}} = \begin{pmatrix}1 \\ 0\end{pmatrix}finkitxmlcodeinlinelatexdvp.
La fonction proposée par Perlin est kitxmlcodeinlinelatexdvpf(r) = (\frac{1}{2} - d)^4 * Kfinkitxmlcodeinlinelatexdvp où kitxmlcodeinlinelatexdvpKfinkitxmlcodeinlinelatexdvp est une constante qui compense les faibles valeurs obtenues suite à l'utilisation d'une puissance 4.
Il est relativement facile, connaissant les coordonnées des points du simplexe auquel appartient kitxmlcodeinlinelatexdvpPfinkitxmlcodeinlinelatexdvp de calculer la valeur du bruit en ce point. L'obtention de ces coordonnées n'est pas si évidente, comme nous allons le voir.
VI-B. Changement de base▲
Les coordonnés des points que nous manipulons sont de la forme kitxmlcodeinlinelatexdvp\begin{pmatrix}x \\ y\end{pmatrix}finkitxmlcodeinlinelatexdvp et sont écrites dans la base canonique (orthonormée directe) kitxmlcodeinlinelatexdvp(\vec{x}, \vec{y})finkitxmlcodeinlinelatexdvp. Mais on peut tout à fait concevoir une base construite sur le pavage par des simplexes réguliers (en dimension 2, ce sont des triangles équilatéraux), de préférence composée de deux vecteurs unitaires.
Ils n'ont, bien entendu, aucune raison d'être orthogonaux.
La figure suivante présente la base dans laquelle nous souhaitons trouver les coordonnées du point kitxmlcodeinlinelatexdvpPfinkitxmlcodeinlinelatexdvp observé. En effet, si nous disposons de ses coordonnées dans cette base, il nous suffit de conserver la partie entière pour obtenir le sommet le plus proche de l'origine. Puisque chacun des vecteurs de notre base est une arrête, nous pouvons, avec ce point, en déduire tous les autres sommets constituant le simplexe.

Le changement de base exact fait intervenir des calculs correspondant à un produit matriciel. Dans le cas plan, les coefficients de la matrice sont des sinus et cosinus, et le calcul ne se simplifie pas élégamment. Nous allons donc utiliser une approximation de la véritable application « changement de base ». Nous cherchons une application linéaire dont la matrice est de la forme kitxmlcodeinlinelatexdvp\begin{pmatrix} K + 1 & \dots & K \\ \vdots & \ddots & \vdots \\ K & \dots & K + 1 \end{pmatrix}finkitxmlcodeinlinelatexdvp ceci afin que le calcul des nouvelles coordonnées se ramène au système kitxmlcodeinlinelatexdvp\left \{ \begin{array}{ccc} x' &=& x + K(x + y + \dots + z) \\ y' &=& y + K(x + y + \dots + z) \\ \vdots \\ z' &=& x + K(x + y + \dots + z) \\ \end{array} \right.finkitxmlcodeinlinelatexdvp où kitxmlcodeinlinelatexdvpx', y', \dots, z'finkitxmlcodeinlinelatexdvp sont les nouvelles coordonnées de kitxmlcodeinlinelatexdvpPfinkitxmlcodeinlinelatexdvp. L'avantage de ces équations est qu'il suffit de calculer un unique produit, pour obtenir par la suite chaque coordonnée par une simple somme. De plus, une magnifique propriété de cette matrice est que son inverse (c'est-à-dire la matrice de l'application réciproque, qui permet de retourner de la nouvelle base à l'ancienne base, afin de calculer les coordonnées de nos vecteurs dans la base canonique) est de la forme kitxmlcodeinlinelatexdvp\begin{pmatrix} 1 - C & \dots & -C \\ \vdots & \ddots & \vdots \\ -C & \dots & 1 - C\\ \end{pmatrix}finkitxmlcodeinlinelatexdvp où kitxmlcodeinlinelatexdvpC = \frac{K}{1 + 2K}finkitxmlcodeinlinelatexdvp.
L'idée est que, si l'on pave notre premier repère, celui qui utilise la base canonique, avec des carrés, on peut alors constater l'existence de couples de triangles équilatéraux dans chacun d'eux. Alors chercher une application qui les transforme en triangles équilatéraux revient à chercher notre changement de coordonnées. Ken Perlin propose quelques valeurs pour K, présentées dans le tableau suivant. Elles sont utilisées dans de nombreuses implémentations.
|
Dimension |
Coefficient |
|
2 |
kitxmlcodeinlinelatexdvp\frac{\sqrt{3} - 1}{2}finkitxmlcodeinlinelatexdvp |
|
3 |
kitxmlcodeinlinelatexdvp\frac{1}{3}finkitxmlcodeinlinelatexdvp |
|
kitxmlcodeinlinelatexdvp\dotsfinkitxmlcodeinlinelatexdvp |
kitxmlcodeinlinelatexdvp\dotsfinkitxmlcodeinlinelatexdvp |
|
n |
kitxmlcodeinlinelatexdvp\frac{\sqrt{n+1} - 1}{n}finkitxmlcodeinlinelatexdvp |
VI-C. Implémentation▲
Nous allons, une dernière fois, présenter une implémentation qui permettra certainement de poser les idées et peut-être d'éclaircir certains concepts. Nous nous appliquerons au cas bidimensionnel, qui constitue l'exemple le plus simple permettant d'illustrer le principe.
////
//Fonction : Produit scalaire
////
double fast_dot(const int *v, const double x,
const double y)
{
return v[0] * x + v[1] * y;
}
////
//Fonction : Obtention du gradient pour un point P(x, y)
// du plan
////
int *get_grad(int x, int y)
{
int rand_value = perm[z + perm[y + perm[x]]];
return _grad3[rand_value & 15];
}
////
//Fonction : Tronque la valeur x
// et ne conserve que sa partie entière
inline int fastfloor(double x)
{
return (x > 0) ? (int)x : (int)x - 1;
}
//La fonction principale
double smooth_noise_3d(double x, double y)
{
//Définition des constantes K et C utilisées
//dans les calculs de changement de base.
const double K = (sqrt(3.) - 1.) / 2.;
const double C = K / (1. + 2.*K);
//On applique la transformation qui permet,
// à partir des coordonnées (x,y),
// d'obtenir les coordonnées (i,j)
// dans la base des simplexes.
double s = (x + y) * K;
double i = x + s;
double j = y + s;
//On tronque les coordonnées de façon à obtenir le point
// le plus proche de l'origine du simplexe contenant P
i = fastfloor(i);
j = fastfloor(j);
//Nous effectuons le changement de base inverse,
// c'est-à-dire qu'à partir des coordonnées (i,j)
// d'un des sommets de notre simplexe, nous
// cherchons les coordonnées (X0, Y0) dans
// la base canonique.
double t = (i + j) * C;
double X0 = i - t;
double Y0 = j - t;
//Nous pouvons alors déterminer le premier vecteur
// AP. Il reste à déterminer BP et CP.
double x0 = x - X0;
double y0 = y - Y0;
//Nous devons déterminer si le point P se trouve
// dans le triangle isocèle supérieur, ou bien
// le triangle inférieur.
//Une fois cela déterminé, et en considérant
// que le premier sommet est (0,0), nous savons
// si le second sommet est (1,0) ou bien (0,1).
// Nous stockons ses coordonnées dans (i1, j1)
int i1 = 0, j1 = 0;
if(x0 > y0)
i1 = 1;
else
j1 = 1;
//Nous pouvons alors déterminer les vecteurs BP et CP
//En effet, si nous appliquons notre formule
// aux vecteurs (0,1) et (1,0), nous
// constatons que les coordonnées dans
// la base canonique sont alors,
// respectivement (-C, 1-C) et (1-C, -C).
//Vecteur AP = (x1, y1)
double x1 = x0 - i1 + C;
double y1 = y0 - j1 + C;
//Le troisième point est nécessairement le point (1,1)
// dont les coordonnées sont (1-2C, 1-2C).
//Vecteur CP = (x2, y2)
double x2 = x0 - 1 + 2.*C;
double y2 = y0 - 1 + 2.*C;
//Nous calculons alors la norme de chacun de ces vecteurs :
//|AP|
double d0 = 0.5 - x0*x0 - y0*y0;
//|BP|
double d1 = 0.5 - x1*x1 - y1*y1;
//|CP|
double d2 = 0.5 - x2*x2 - y2*y2;
//Nous stockons le résultat du calcul dans la variable res
double res = 0;
//On applique un modulo 255 aux coordonnées i et j
// afin de pouvoir déterminer leur gradient.
int ii = (int)i & 255;
int jj = (int)j & 255;
//On ne calcule le produit scalaire que si les
// fonctions radiales sont positives.
//Dans ce cas, on effectue le produit scalaire,
// exactement de la même façon qu'avec
// le bruit de Perlin.
if(d0 > 0)
{
d0 *= d0;
res += d0 * d0 *
dot(__get_grad(ii, jj), x0, y0);
}
if(d1 > 0)
{
d1 *= d1;
res += d1 * d1 *
dot(__get_grad(ii+i1, jj+j1), x1, y1);
}
if(d2 > 0)
{
d2 *= d2;
res += d2 * d2 *
dot(__get_grad(ii + 1, jj + 1), x2, y2);
}
//On applique le facteur K permettant de ramener
// l'amplitude de la valeur proche de [-1, 1].
return 60 * res;
}VII. Conclusion▲
Vous disposez maintenant de toutes les connaissances nécessaires à l'implémentation d'un bruit de Perlin à N dimensions. Vous trouverez sur Internet nombre de documents expliquant comment composer un bruit de Perlin avec d'autres fonctions afin d'obtenir des textures semblables à du bois, du marbre, du feu, et de nombreuses autres matières.
Si vous souhaitez en apprendre plus sur les substituts au bruit de Perlin, je vous recommande chaudement de vous renseigner au sujet du bruit de Gabor.
VII-A. Remerciements▲
Je tiens à remercier Mael Minot, Antoine Pinochet-Lobos et Maxime Gault pour leur relecture orthographique.
VII-B. Références▲
- Wikipedia EN - Interpolation Bicubique
- Wikipedia EN - Interpolation Tricubique
- A. Lagae, S. Lefebvre, G. Drettakis P. Dutré - Procedural Noise using Sparse Gabor Convolution
- Wikipedia EN - Perlin noise
- Ken Perlin - Making Noise
- Ken Perlin - Improving Noise
- Hugo Elias - Perlin Noise
- Paul Bourke - Perlin Noise and Turbulence
- Paul Bourke - Interpolation methods
- Pierre Schwartz - Génération de terrain par l'algorithme de Perlin
- François Faure - Interpolation de positions-clefs
- Stefan Gustavson - Simplex noise demystified
- Iñigo Quilez - Advanced Perlin Noise